|
|
CONFRONTO FOTOGRAFICO TRA MODELLI DI SNODI MECCANICI
CHE RIPRODUCONO LA MOVIMENTAZIONE DEL GINOCCHIO
Abbiamo voluto valutare quali possono essere le incongruenze tra il moto del ginocchio e quello determinato da diversi tipi di snodi meccanici utilizzati nei tutori mobili, comunemente proposti per una gran parte della traumatologia del ginocchio.
Le nostre considerazioni traggono spunto dal fatto che il movimento del ginocchio ripropone un moto roto-traslatorio: Smidt, 1973; Fumagalli,1977; Marinozzi e Pappalardo, 1977; Kapandji, 1977; Tittel, 1979; Fleischmann, Line, 1981; Nissel, 1985; Insall, 1986, Draganich et al., 1987; Yamaguchi and Zajac, 1989; Melegatti, 1997.
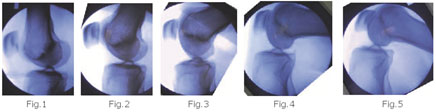
Prendendo come punto di partenza la gamba estesa 0° (Fig. 1), la meccanica articolare prevede che nei primi 25-30° di flessione, il ginocchio abbia un moto di solo rotolamento (Fig. 2); poi (Fig. 3, 4 e 5), il rotolamento si combina con uno scivolamento (in avanti) dei condili femorali sul piatto tibiale che diviene sempre più predominante.
Abbiamo anche considerato alcune opinioni contrarie a quanto sopra riportato, ovvero quelle formulate nei lavori di seguito elencati (Loudon et al, 1998; Putz, 1995; Townsend Ind. Inc., Patent n. EP 0 361 405 A, 04.04.1990; Townsend, Jeffrey H., Williams Robert J., US, patent n. WO 92 15264 A, 17.09.92), fondate sull’ipotesi che nella flesso-estensione il moto del ginocchio sia trasla-rotatorio, ovvero consista inizialmente in uno scivolamento anteriore del femore sulla tibia di circa 8-9 mm (per un arco di 20-25°), al quale segue una fase di rotazione dai 25° in poi.
|
|
|
|
MATERIALI E METODI
Per poter effettuare il nostro studio, come primo punto, abbiamo ricostruito un modello monoplanare del ginocchio in materiale plastico che riproduceva il profilo del femore e della tibia, rispettando le dimensioni medie dell’articolazione di un adulto. Successivamente abbiamo scelto 4 diversi tipi di snodo utilizzati per la costruzione di ginocchiere armate su ognuno dei quali abbiamo fissato un modello monoplanare.
DESCRIZIONE MECCANICA DEGLI SNODI
E’ noto che lo snodo utilizzato in un tutore del ginocchio è formato da un’articolazione meccanica collegata a due bracci, uno superiore, al quale è stato fissato il profilo femorale, ed uno inferiore, al quale è stato fissato il profilo tibiale. |
|

|
SNODO A CENTRO FISSO
Consiste in un perno centrale, che ripropone un moto rotatorio attorno ad un punto.
Tenendo vincolato il braccio tibiale, quello femorale, nella flessione, eseguirà, attorno al perno centrale, un moto rotatorio.
SNODO A DOPPIO CENTRO
I due bracci vengono posti a contatto tra loro con un estremo, ognuno dei quali presenta un profilo arrotondato e disegnato a ruota dentata. Al centro di ogni singolo arrotondamento è posto un perno in modo che ad un movimento di rotazione di un braccio, attorno al proprio perno, corrisponda un analogo movimento, nel senso opposto, dell’altro braccio.
Tenendo vincolato il braccio tibiale, quello femorale, nella flessione, eseguirà un moto cicloide retrogrado.
SNODO A CENTRO DI ROTAZIONE SALTATA
È composto da una piastra principale, collegata al braccio superiore, che presenta due scanalature, una centrale (trasversale) di piccole dimensioni e una periferica (circolare) di grandi dimensioni; ogni scanalatura alloggia e guida un proprio perno, fissato su una piastra esterna. Durante i primi 25° di flessione, il fulcro è il perno alloggiato nell’estremità superiore della scanalatura circolare e costringe il primo perno posizionato nella scanalatura trasversale a spostarsi avanti per tutta la lunghezza della scanalatura stessa (traslazione lineare 8-9 mm), simulando lo scivolamento anteriore dei condili femorali rispetto al piatto tibiale. Nella seconda fase della flessione (dai 25° ai 120°) il fulcro salta sul secondo perno alloggiato alla fine della scanalatura lineare attorno al quale lo snodo sviluppa la sua traiettoria circolare guidata dal perno alloggiato nella scanalatura circolare.
Tenendo vincolato il braccio tibiale, quello femorale, nella flessione, eseguirà un moto trasla-rotatorio.
SNODO A CENTRO DI ROTAZIONE VARIABILE KTJ©
È formato da due piastre, una delle quali ha due scanalature; la prima di piccole dimensioni è posta al centro della piastra stessa che si allunga linearmente verso il basso, mentre la seconda inizialmente (da 0 a 30°) ha una forma circolare che successivamente diventa una spirale rientrante verso il centro della piastra stessa. L’altra piastra presenta due perni, il primo viene inserito nella scanalatura lineare, mentre il secondo viene collocato in quella curvilinea. Ogni piastra è collegata ad un relativo braccio (femorale e tibiale); nel movimento di flessione, quindi, lo snodo determina un iniziale movimento rotatorio che dopo i 30° viene combinato con uno scivolamento determinato dalla parte a spirale dell’apertura periferica . Tenendo vincolato il braccio tibiale, quello femorale, nella flessione, eseguirà un moto roto-traslatorio.
|
|
IL CENTRO INIZIALE DI ROTAZIONE
Per determinare un punto di riscontro comune a tutti gli snodi con il quale poter uniformare il posizionamento dei modelli di plastica rispetto al relativo snodo meccanico, è stato preso in considerazione il centro iniziale di rotazione individuato secondo il metodo impostato da Nietert (1976). Tale punto può essere individuato misurando la lunghezza antero-posteriore del condilo femorale. Un terzo di tale misura è stata posta come distanza alla quale tracciare la parallela alla tangente al profilo posteriore del condilo femorale e la parallela alla tangente al suo profilo inferiore. L’intersezione delle due parallele, individua il centro iniziale di rotazione. Nei nostri modelli, tale riferimento si è potuto applicare sullo snodo a centro fisso, su quello a centro di rotazione variabile (impostando la posizione iniziale del perno centrale come centro iniziale) e su quello a centro di rotazione saltato (impostando la posizione iniziale del perno centrale come centro iniziale), mentre non è stato possibile per lo snodo a doppio centro, in quanto il movimento viene sempre a svilupparsi attorno ai due centri.
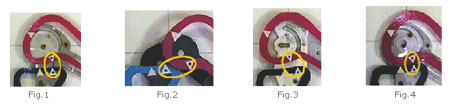
Su ogni modello sono stati posti dei marcatori a distanza standard per poter evidenziare le eventuali incongruenze di traiettoria tra il movimento reale riportato nelle radiografie, e quello determinato da ogni singolo snodo. Per un confronto più evidente, comunque, sono stati inizialmente ricalcati i contorni dei profili articolari dei modelli nelle varie posizioni e sovrapposti a quelli reali radiografico (sfondo opaco).
|
|
|
| |
|
|
|
|
|
|
|
RIFERIMENTI
BIBLIOGRAFICI |
Di Cosmo F.,
Pellis G.:
Influenza di diversi tipi di snodo per tutore del ginocchio sui rapporti dinamici fra femore e tibia,
Riv. It. Biol. Med., 23 (Suppl. 1 al n. 1-2), 405-7, 2003, Atti del 16° Congresso Nazionale della Società Italiana di Artoscopia, Genova 28 aprile-1 maggio 2003. |
| |
|
|